槽式太阳能热发电是目前国际上发电规模最大,且已经实现商业化的,较为理想的太阳能热发电技术。槽式太阳能跟踪控制系统,本质上属于单轴跟踪系统,相对于塔式和蝶式跟踪控制系统,相对简单一些。本文根据常见的槽式驱动机构的不同,对槽式支架跟踪控制系统做一个简单的概述。
基于液压缸驱动的槽式定日镜支架跟踪控制系统
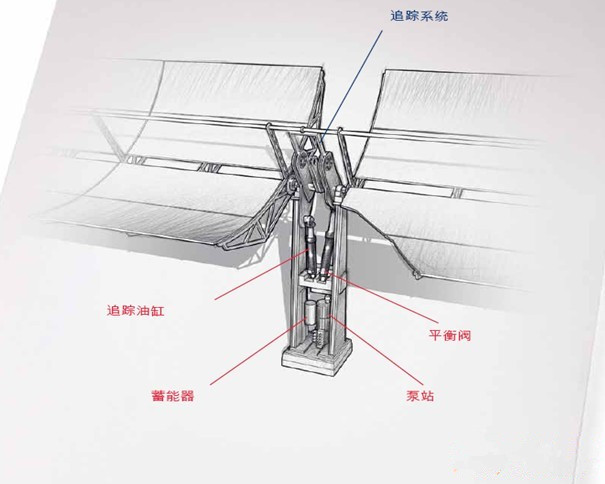
图1:槽式液压驱动定日镜驱动机构示意图
该机械机构,由追踪油缸、平衡阀、蓄能器、泵站(一般由电机和4个液压阀组成)等构成。控制系统控制两个油缸来驱动定日镜旋转到追踪的位置。该装置被成功的应用于国外的槽式电站中。一般都是南北向来进行安装。
国内对该结构的驱动和控制系统的研究也比较深入,已经实现了较为成熟的控制方案。常规的控制方案是:用倾角传感器或者旋转编码器来对机械结构进行定位,得知定日镜当前所处的角度,同时根据天文算法算出机械结构理论上的角度,当两个角度存在偏差时,驱动2个油缸的运动,使定日镜旋转到理想的位置。
控制上的难点:
1)定日镜机械支架当前角度的精准测量。机械结构当前角度的测量一般都是由传感器来实现的。当机械结构的旋转机构存在震动或者由于外力(比如风力忽大忽小)等的影响,传感器的输出会存在一个跳变,或者输出信号中会一直叠加一个干扰的波形,如果控制器的鲁棒性不强,很容易会误动作。
2)驱动油缸的切换。该机构属于断续跟踪的形式,在该机构正常的追踪过程中,会存在两个油缸的切换,两个油缸可能同时推,同时拉,一个推一个拉。如果切换不及时或者不准确,很容易导致机械结构的损坏。一般控制厂家都会做大量的测试,根据机械结构的不同,设置不同的换向死区点,来达到精确控制的目的。
基于电机驱动的槽式定日镜支架控制系统
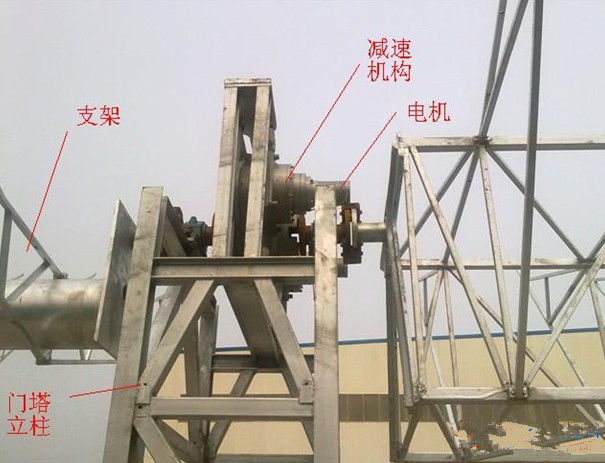
图2:槽式电机驱动定日镜机构示意图
该机械机构,由驱动电机(交流电机、伺服电机或者步进电机,不同厂商不同)、减速机、联轴器、驱动支架等构成。控制系统控制电机的正转和反转来驱动定日镜旋转到追踪的位置。该装置为了实现较精准的控制,一般会配有角度传感器或者追日传感器以实现闭环的控制。
该控制方案如果采用普通的电机,则需要不断的控制电机的启停,启停过程中,电机会随着载荷的不同而呈现出不同的运行轨迹。对于较高精度不大现实。如果采用步进电机或者伺服电机,可以实现精确的控制,但是成本上会稍微高一些。
两种槽式跟踪控制系统的比较
相比液压的控制方式,电机的驱动载荷能力弱一些;但是电机的驱动方案会大大降低由于液压中两个油缸的配合不好导致机械出现故障的概率。同时,如果采用步进电机或者伺服电机驱动可以实现连续跟踪。众所周知,连续跟踪会比断续跟踪的效果好。总之,不论采用哪种结构形式,从控制策略上来讲,闭环控制比开环控制要好,实时修正比定时修正要好。
本文对常见的槽式驱动控制系统,做了简单的概述。当前,还存在其他的一些结构,比如极轴式槽式跟踪系统等;就控制系统而言也各有特点,在此就不再赘述了。
本文转载于光热发电网















